|
|

|

|
| e-Pub |
Section: New Results
Real-time control and scheduling for stimulation systems
Participants : Daniel Simon, David Andreu, Ronan Le Guillou, Benoît Sijobert.
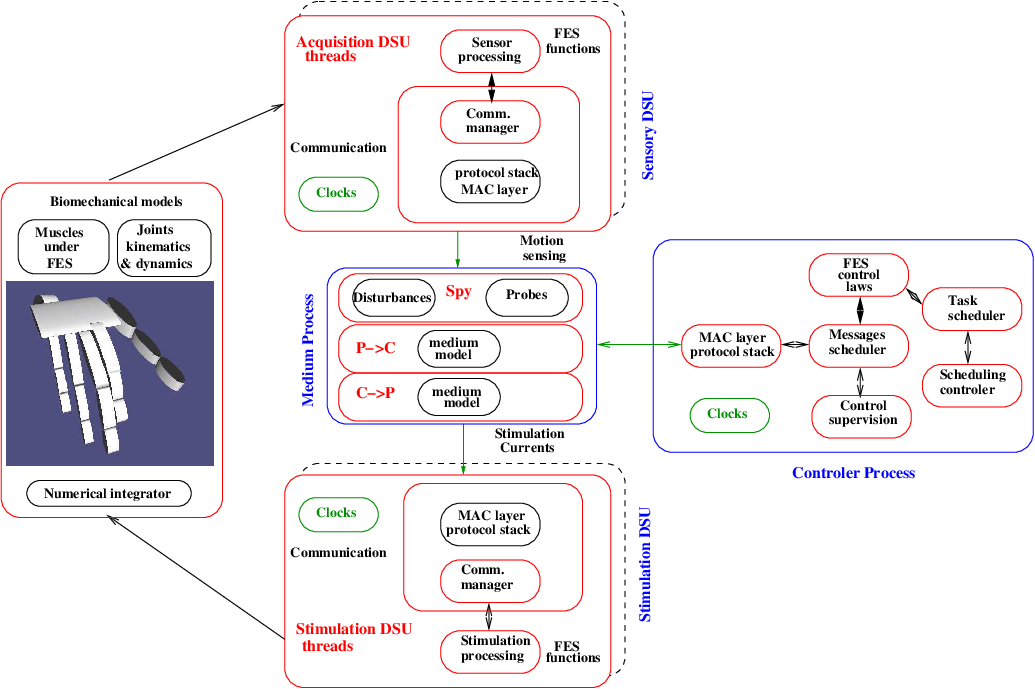
Functional Electrical Stimulation (FES) is used in therapy for rehabilitation or substitution for disabled people. They are control systems using electrodes to interface a digital control system with livings. Hence the whole system gathers continuous-time (muscles and nerves) and discrete-time (controllers and communication links) components. During the design process, realistic simulation remains a precious tool ahead of real experiments to check without danger that the implementation matches the functional and safety requirements [15].
To this aim a real-time open hybrid simulation software has been developed. It is dedicated to the analysis of FES systems deployed over distributed execution resources and wireless links. The simulation tool is especially devoted to the joint design and analysis of control loops and real-time features. Such simulator can be used for the design, testing and preliminary validation of new technologies and implementation. The initial design, working with a simple model of a knee, is currently extended with the dynamic model of a human hand (Figure 17).
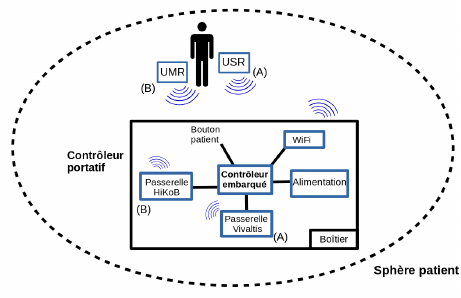
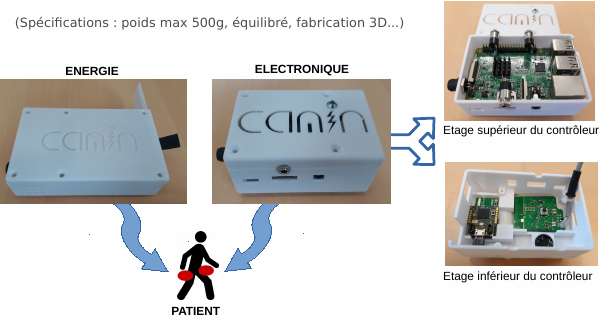
A portable controller has been prototyped to run control loops using stimulation and sensing probes. ([32]). It is architectured around a Raspberry Pi3B single board computer, and provides USB ports towards sensing probes from HiKoB and stimulation units from Vivaltis. It uses a dedicated RT_PREEMPT linux kernel to make the system real-time control compliant (Figure 18).
Beyond software-in-the-loop simulation, the controller has been firstly tested connected with the previously developed simulation models to perform a hardware-in-the-loop simulation system and further experiment control/computing co-design algorithms ([25]). Gateways has been developed to connect the Vivaltis and HiKoB probes, together with a small graphical end-user interface. The whole embedded system has been succesfully validated for future applications through a pertinent real-time metrology.